随着城市化进程的加速和机动车保有量的持续增长,城市交通拥堵问题日益严峻。传统的定时或固定模式的交通信号灯控制方法已难以适应复杂多变的交通流状况。在此背景下,智能交通信号灯控制系统应运而生,它通过集成先进的感知、通信、计算与控制技术,实现对路口交通信号的动态、自适应优化,旨在提升路网通行效率,缓解交通压力,并保障出行安全。
一、系统总体设计框架
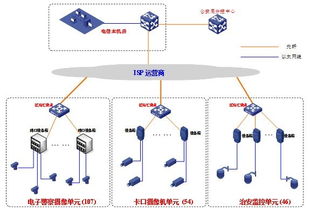
一个完整的智能交通信号灯控制系统通常采用分层分布式架构,其核心设计理念是“感知-分析-决策-控制”的闭环反馈。系统主要由以下三个层次构成:
- 感知与数据采集层: 这是系统的“眼睛”和“耳朵”。通过部署在路口的各类传感器(如地磁线圈、视频摄像机、雷达、激光雷达等)实时采集交通流数据,包括各方向的车流量、车速、车型、排队长度以及行人过街需求等。这些实时数据是系统进行智能决策的基础。
- 通信与数据处理层: 这是系统的“神经网络”。负责将感知层采集的原始数据通过有线或无线通信网络(如光纤、4G/5G、专用短程通信DSRC等)传输至边缘计算设备或区域/中心云平台。在此层,利用数据清洗、融合和分析技术,将原始数据转化为可供决策引擎使用的结构化信息,如交通流模式、拥堵指数和预测流量。
- 决策与控制执行层: 这是系统的“大脑”和“手脚”。基于处理后的交通数据,运用先进的算法模型(如自适应控制算法、强化学习、模糊逻辑、模型预测控制等)进行实时运算,动态生成最优的信号配时方案(包括绿灯时长、相位顺序、周期长度等)。生成的指令通过控制网络下发至路口的信号控制器,驱动信号灯状态切换,完成对交通流的实时引导。
二、核心硬件产品构成
智能交通信号灯控制系统的效能高度依赖于其硬件基础,主要包括:
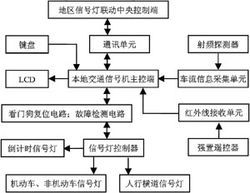
- 智能交通信号控制器: 系统的核心执行单元。新一代控制器具备强大的计算能力、丰富的I/O接口和稳定的工业级可靠性,能够运行复杂的控制算法,接收并执行来自上层平台的优化指令,同时也可在通信中断时降级为自主协调控制模式。
- 多模态交通检测器: 包括视频检测单元、微波/雷达检测器、地磁检测器等。它们正朝着高精度、高可靠性、全天候工作的方向发展,并越来越多地采用多传感器融合技术,以提升数据采集的准确性和鲁棒性。
- 边缘计算网关/设备: 部署在路口或区域附近,负责对本地数据进行初步处理、分析和存储,实现低延迟的实时响应,减轻云端计算压力,并能在网络不稳定时保障本地控制的基本运行。
- 车路协同路侧单元(RSU): 在车路协同(V2X)场景下,RSU作为关键通信基础设施,能够与车载单元(OBU)及信号控制器交互,为网联车辆提供红绿灯状态、相位与配时、危险预警等实时信息,支持更高级别的协同控制与安全应用。
三、关键软件技术与算法
软件是智能交通信号灯控制系统的“灵魂”,其核心在于优化控制算法:
- 自适应控制算法: 如SCATS、SCOOT等经典系统,根据实时检测的交通流量动态调整信号周期和绿信比。当前的研究热点在于更精细化的实时优化和区域协同。
- 人工智能与机器学习算法: 应用深度强化学习(DRL)等方法,让控制系统通过与环境的不断交互(试错)来学习最优控制策略,能够处理高度非线性、随机性的复杂交通场景,实现全局路网效率的优化。
- 模型预测控制(MPC): 基于交通流模型对未来一段时间内的交通状态进行预测,并通过滚动优化求解未来数个周期内的最优控制序列,兼顾实时性与前瞻性。
- 交通仿真与数字孪生平台: 在部署前,利用微观交通仿真软件(如VISSIM, SUMO)对控制策略进行大规模测试与评估。数字孪生技术则能构建物理路口在虚拟空间的实时映射,实现控制策略的在线仿真、验证与优化。
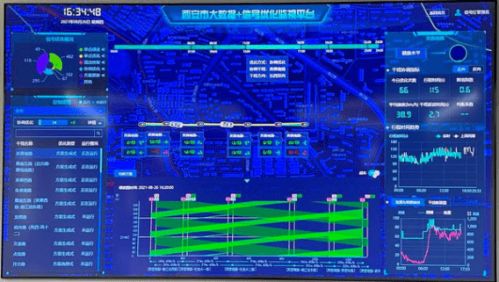
- 统一管理平台软件: 提供可视化的系统监控、配置管理、数据分析、报表生成和远程运维功能,是交通管理人员进行系统操作和决策支持的主要界面。
四、应用前景与挑战
智能交通信号灯控制系统正朝着网联化、协同化、一体化的方向深度演进。通过与高精度地图、自动驾驶汽车、智慧城市大脑的深度融合,有望实现从“车看灯”到“灯看车”乃至“车路协同”的根本性转变,构建安全、高效、绿色的新一代智慧交通体系。
系统的发展仍面临诸多挑战:多源异构数据的深度融合与质量保障、复杂算法在高并发实时场景下的工程化落地、大规模系统部署与维护的成本、网络安全与数据隐私保护、以及现有基础设施的升级改造兼容性等。解决这些问题需要交通工程、电子信息、计算机科学等多学科的交叉创新与持续协作。
智能交通信号灯控制系统作为智慧交通的关键节点,其设计与相关软硬件产品的进步,将持续为提升城市交通管理水平、改善公众出行体验注入核心动力。